Settings
The settings menu can be accessed via the Navigation Menu
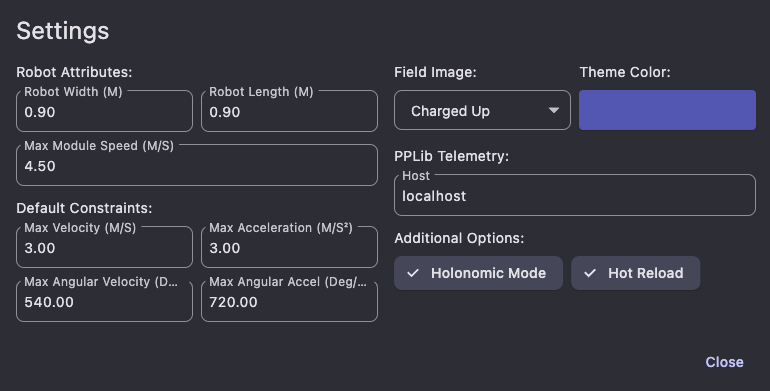
Robot Attributes
- Robot Width - The width of the robot, including bumpers, in meters. Used for visualization.
- Robot Length - The length of the robot, including bumpers, in meters. Used for visualization.
- Max Module Speed - The max speed of a swerve module in meters per second. This does not directly affect paths, but will make the robot's rotation speed in previews more closely match reality.
Default Constraints
These values will be used as the default global constraints when creating new paths. Updating these values will also update the constraints of any paths set to use the defaults.
- Max Velocity - Max linear velocity in meters per second.
- Max Acceleration - Max linear acceleration in meters per second squared.
- Max Angular Velocity - Max rotational velocity in degrees per second.
- Max Angular Accel - Max rotational acceleration in degrees per second squared.
Other Settings
- Field Image - Select the field image used as the background of the editor. This contains options for official field images and the ability to import custom images.
- Theme Color - Change the UI theme color.
- Holonomic Mode - Enable or disable holonomic mode. This is on by default. This must be enabled to access special features for holonomic drive trains.
- Hot Reload - Enable or disable hot reload for paths and autos. This is off by default. When connected to the robot, hot reload will automatically sync changes to paths and autos in the GUI to the paths and autos loaded in robot code. This allows you to quickly iterate and test changes without needing to redeploy or restart robot code. PLEASE, PLEASE, PLEASE disable this at competition, so you don't accidentally change a path on the robot that you do not wish to.
- PPLib Telemetry - The host address of the robot for use in telemetry and hot reload.
ℹ️
If running simulation, this should be localhost. If connected to a robot, this should be the IP address of the roboRIO: 10.TE.AM.2 where TEAM is replaced by your team number, i.e. 10.30.15.2.